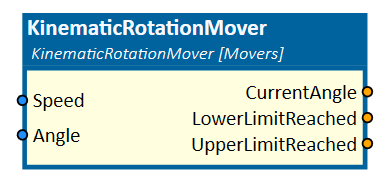
KinematicRotationMover
This simulation component rotates 3D objects or groups of 3D objects around a definable axis.
When to use
Use this simulation component if you want rotate 3D objects relative to their parents around an axis. The rotation is done by setting either the angle or the speed of the movement. With this simulation component you can build a rotational axis, which is rotated by e.g. a servo motor.
How to use
Add this simulation component from the simulation component library. At first select a 3D object or an assembly either in the 3D View window or in the Assembly Structure window using the select button near the property Object3D. Then define the rotation axis and rotation point either in the global or in the local coordinate system of the selected 3D object. Finally you can define the ControllingType which indicates whether the 3D object should be rotated by setting the angle or the speed of the movement.
Parameters
GlobalRotationAxis
Indicates the rotation axis in the global coordinate system.
LocalRotationAxis
Indicates the rotation axis in the local coordinate system of the selected 3D object. You first have to select a 3D object, before you can define the LocalRotationAxis.
GlobalRotationPoint
Indicates the rotation point in the global coordinate system.
LocalRotationPoint
Indicates the rotation point in the local coordinate system of the selected 3D object. You first have to select a 3D object, before you can define the LocalRotationPoint.
Object3D
The 3D object which will be rotated relative to it's parent. The rigid body behavior of this 3D object and any children must be either None or Kinematic.
ControllingType
Indicates if the 3D object should be rotated by setting the position or the speed of the movement.
InitialPosition
A value in degree indicating the initial position of the 3D object.
LowerLimit
Indicates the lower limit of the rotation in degree. If negative infinite is defined the rotation of the 3D object is not limited.
UpperLimit
Indicates the upper limit of the rotation in degree. If positive infinite is defined the rotation of the 3D object is not limited.
MaxRotationSpeed
Indicates the maximum rotation speed in rad/s. When the parameter ControllingType is set to Speed, the input Speed is multiplied by this factor.
Inputs
Angle
An input in rad indicating the target angle of the rotation.
Speed
An input indicating the speed of the movement in fractions of the parameter MaxRotationSpeed. 1.0 means 100% of the parameter MaxRotationSpeed.
Outputs
CurrentAngle
Outputs a value in rad indicating the current angle of the rotation.
LowerLimitReached
Outputs a value indicating whether the lower limit of the rotation is reached or not.
UpperLimitReached
Outputs a value indicating whether the upper limit of the rotation is reached or not.
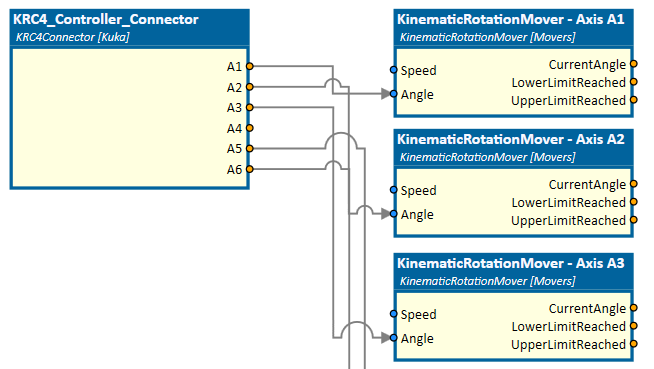
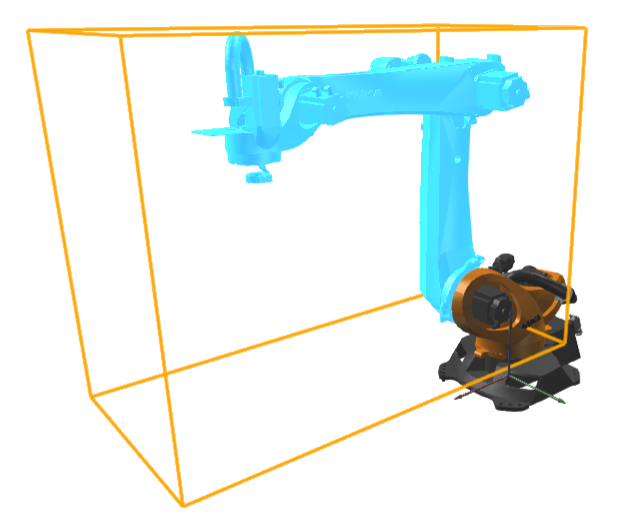
Example
In this example, the angle outputs of a KR C4 controller are used to rotate the axes of a 3D KUKA robot model. In the picture below the parameters for rotating the second axis A2 of the robot are shown. The positive rotation direction of the rotation, which is defined by the right-hand rule, is in the direction of the local y-axis. The global rotation point has been selected in the 3D View window.
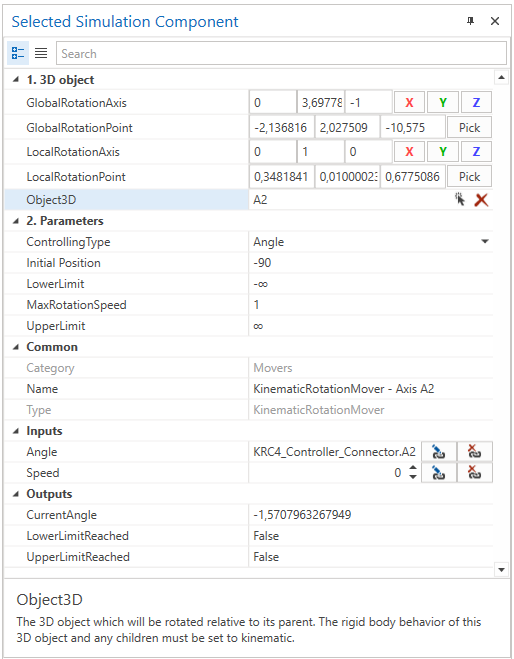
Due to the fact that axis A2 of the CAD model deviates by 90 degrees from the parameterized robot model in the KR C4 controller, the parameter InitialPosition is set to that value.
Further Information
For more details visit the Video Guides section, where you can find a video guide demonstrating this topic under Conveyor rollers or Kinematization of rotary indexing tables and turntables.