How to simplify concave meshes?
As described in the section What is essential for collision detection?, the approximation of objects are needed to ensure real-time interactivity during the collision of materials.
Therefore, twin provides different algorithms for simplifying concave objects.
Where can I find the algorithms?
The algorithms are in the settings in the Mesh Simplifier register.
There, different algorithms can get added to the project.
Those created templates will be listed in the view as can be seen in the following picture.
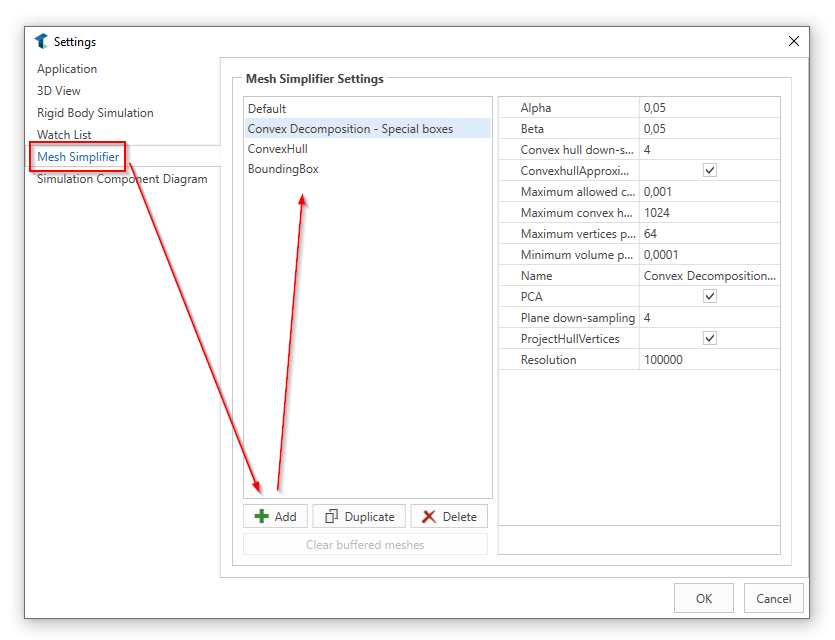
Basically, we decide between three types of algorithms:
- ConvexDecomposition: The concave object will be approximated with convex ones.
- BoundingBox: The object will be simplified by the bounding box of the object.
- ConvexHull: The object will be simplified by a convex hull.
If the 3D object is selected, the mesh simplifier property provides all templates which are created in this project. The template which fits best can get choosen. The property with the drop down can be seen in the red rectangle in the picture below.
Note
The algorithms are only needed, if the object is NOT convex. If it is already convex, twin can calculate the collisions very well. The object is concave, when the convex property is not set, as can be seen in the green rectangle in the following picture.
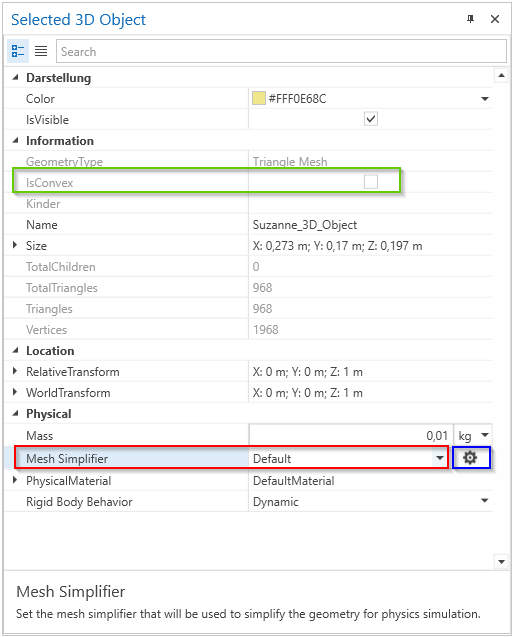
The mesh simplifier templates can also get accessed via the setting button which is in the blue rectangle next to the mesh simplifier property.
Note
The simplifier will be applied, if the object is of rigid body type Dynamic. Static or Kinematic objects can get simulated as original meshes.
Further Information
For more details visit the Video Guides section, where you can find additional information and video guides on this topic under Simulate complex 3D-Objects in real time.