VacuumGripper
This simulation component turns a selectable 3D object into a gripper, which fixes any dynamic object which touches the gripper.
When to use
Use this simulation component if you want to turn a 3D object into a gripper. With a gripper you can fix any dynamic object which touches the 3D object. These objects can then be moved by moving the gripper.
How to use
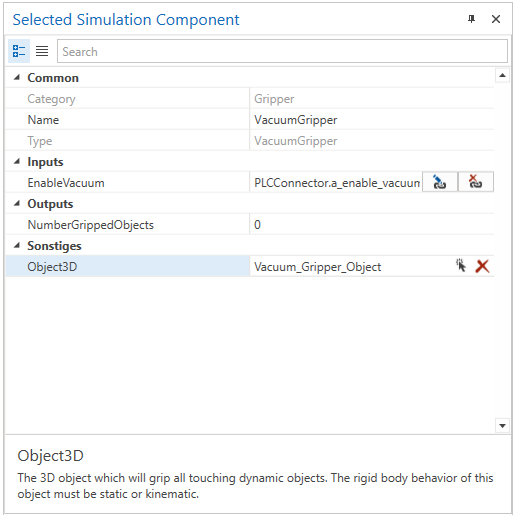
Add this simulation component from the simulation component library. Define the 3D object, which acts as the gripper by selecting a 3D object either in the 3D View window or in the Assembly Structure window using the select button in the Object3D property.
The dynamic objects, which are touching the gripper, will be moved if the gripper object moves and the vacuum is enabled.
Note
The rigid body behavior of the 3D object, which should act as a gripper, must be static or kinematic. If the gripper object moves, the rigid body behavior must be kinematic.
Parameters
Object3D
The 3D object which acts as a gripper. The rigid body behavior of the object must be static or kinematic.
GripperBehavior
Defines the behavior of the gripper. The gripper can either be Stiff or Soft. A stiff gripper fixes gripped objects, while objects gripped by a soft gripper can rotate a little.
When gripped objects collide with other objects, a soft gripper leads to a more stable simulation.
Stiffness
A value indicating the stiffness of the soft gripper. The higher the value, the stiffer the gripper. This parameter is only visible if the GripperBehavior is set to Soft.
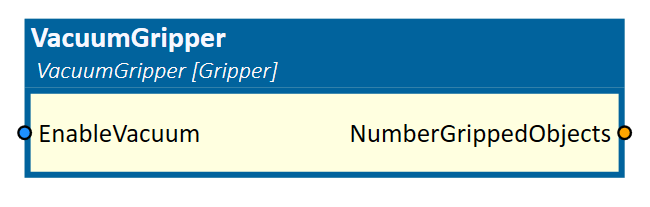
Inputs
EnableVacuum
An input indicating whether other dynamic 3D objects are gripped or not.
Outputs
NumberGrippedObjects
An output indicating the number of objects which are currently fixed by the gripper.
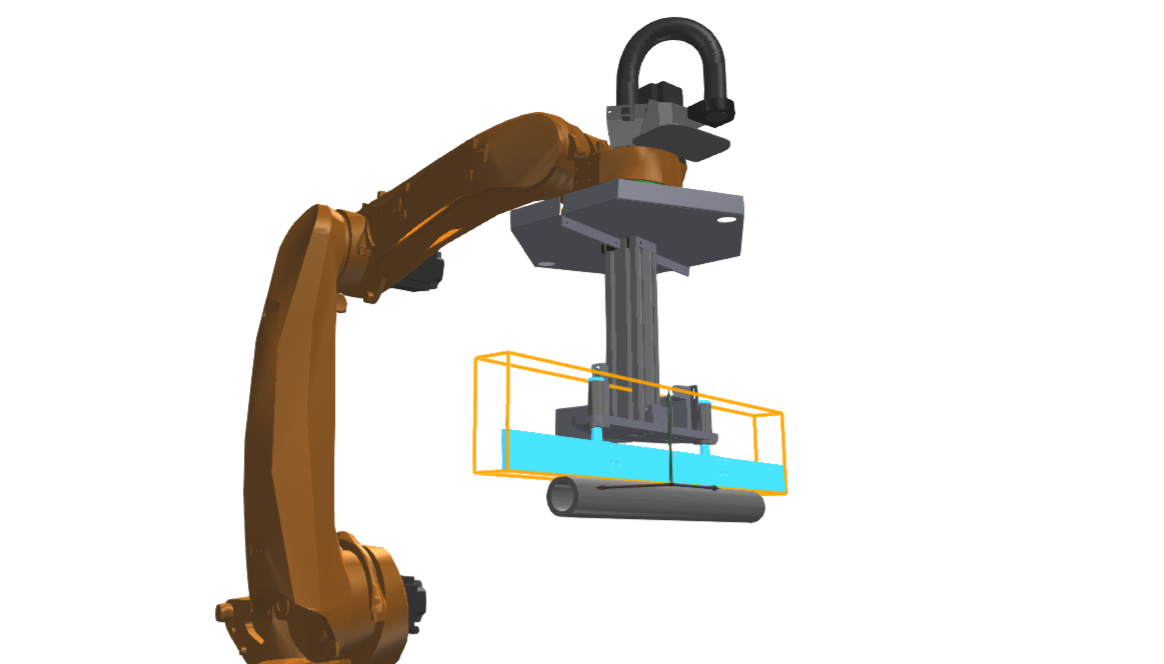
Example
In this example, a robot has the job to pick up and handle different types of tubes, which are dynamic rigid body's in the simulation environment.
Therefore, the 3D object of the robot gripper is selected as template. The rigid body behavior of the gripper object is defined as kinematic.
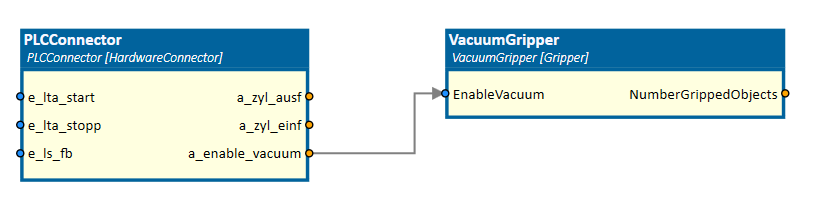
A PLCConnector simulation component enables and disables the vacuum on the gripper. To move the different axis of the robot, a KinematicRotationMover simulation component is used.
Further Information
For more details visit the Video Guides section, where you can find a video guide demonstrating this topic under Vacuum gripper or Spring-loaded vacuum gripper.