RandomBoolean
This simulation component outputs a random boolean value.
When to use
Use this simulation component if you want to output a random boolean value when the simulation component gets triggered.
How to use
Add this simulation component from the simulation component library. When the simulation is running and the input Trigger is triggered, the simulation component outputs a random boolean value.
Inputs
Trigger
If triggered, this input generates a Random boolean output value.
Outputs
Random
Outputs a random boolean value.
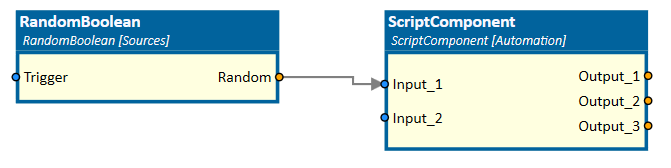
Example
In this example, after a defined time interval the IntervalTrigger simulation component triggers a random boolean value. The machine control, which was mapped with the help of the ScriptComponent simulation component, processes this value and must react accordingly.
