DataTypeConverter
This simulation component enables changing the data-type of a signal.
When to use
Use this simulation component if you want to change the data-type of a signal.
How to use
Add this simulation component from the simulation component library. Define the OutputDataType and connect the signal which should be converted.
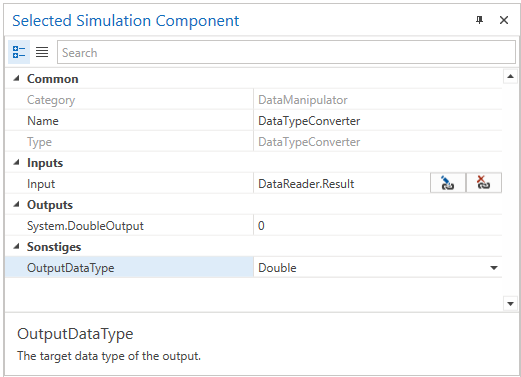
Parameters
OutputDataType
Indicating the target data-type of the output.
| Value | Description |
|---|---|
| Double | The input data-type will be changed to the type of Double. |
| UInt32 | The input data-type will be changed to the type of UInt32. |
Inputs
Input
An input which data-type will be changed.
Outputs
After the OutputDataType is defined, the output of the specified data-type is listed here.
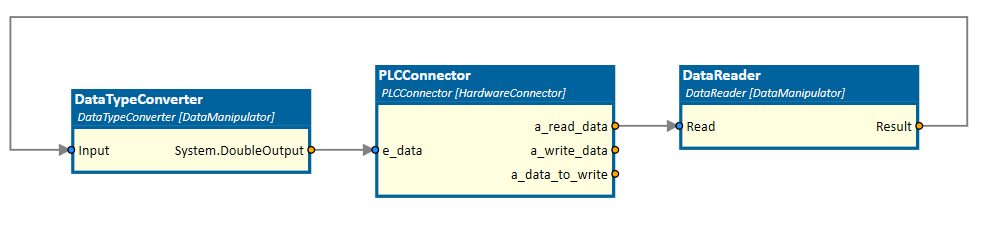
Example
In this example, the data-output of a DataReader simulation component is changed to the type of double.