CollisionSink
This simulation component removes any rigid body object (e.g. dynamic, kinematic) which touches the sink object during simulation.
Note
Prior to twin 24.2 this simulation component was called Object3DSink. With twin 24.2 we have renamed it to CollisionSink.
When to use
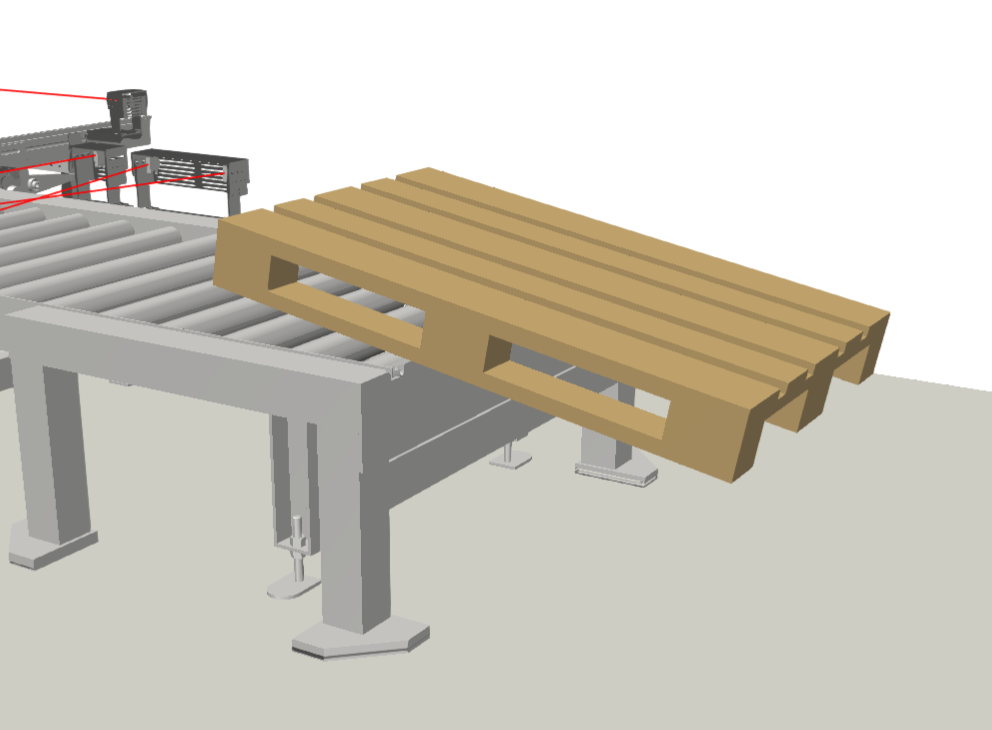
Use this simulation component if you want to remove any rigid body object which touches the sink object while the simulation is running. For example, the pallet in the figure below should be removed when it touches the ground.
How to use
Add this simulation component from the simulation component library. Select a SinkObject and define if dynamic or/and kinematic objects should be removed when they touch the SinkObject. Set the EnableSink input to True and start the simulation.
Note
The objects which are removed can't get restored with the reset!
Note
The RigidBodyBehaviour of the sink object must be kinematic or static.
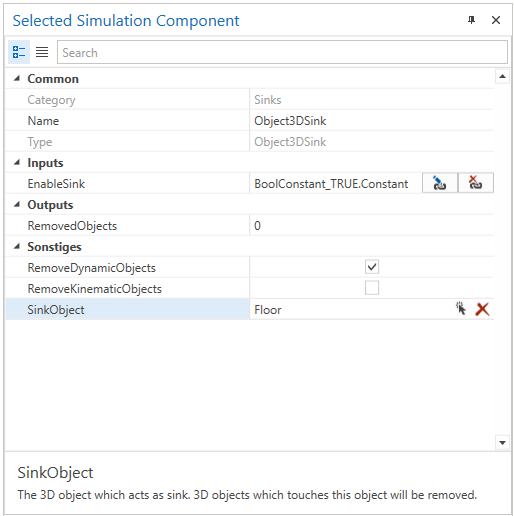
Parameters
RemoveDynamicObjects
Indicates whether dynamic 3D objects will be removed when they touch the sink object or not.
RemoveKinematicObjects
Indicates whether kinematic 3D objects will be removed when they touch the sink object or not.
SinkObject
Indicates the 3D object which acts as sink. 3D objects which touches this object will be removed.
Inputs
EnableSink
An input indicating whether the sink removes touching objects or not.
Outputs
RemovedObjects
An output indicating how many 3D objects have been removed by this sink since the last simulation reset.
Example
In this example, palettes which are falling off the conveyor, should be deleted. Therefore, the static object Floor is selected as the SinkObject.
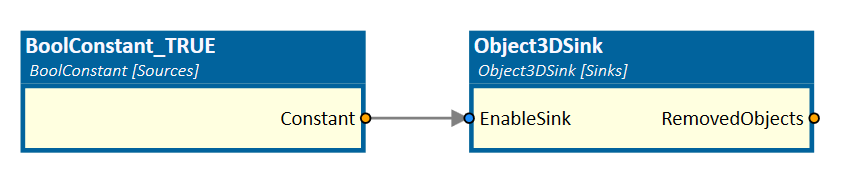
The EnableSink is connected to a BoolConstant simulation component which outputs a constant True value.
Further Information
For more details visit the Video Guides section, where you can find a video guide demonstrating this topic under Remove 3D-Objects with sinks.