KinematicGripper
The KinematicGripper component converts a selectable 3D object into a functional gripper.
It securely holds any dynamic or kinematic 3D object that either touches the gripper geometry or intersects with its detection ray.
When active, the component temporarily changes the 3D object's RigidBodyBehavior to kinematic.
Once released, the 3D object automatically reverts to its original physics state.
This mechanism allows target 3D objects to seamlessly follow the movement and transformations of the gripper.
When to use
Use this component if you want to turn a 3D object into a gripper. With a gripper you can fix any dynamic and kinematic 3D object which touches the gripper 3D object or a light ray.
These 3D objects can then be moved by moving the gripper. While being gripped the Rigid Body Behavior of the gripped 3D objects changes to kinematic.
Use this component if the gripped 3D object tends to be unstable or to save computing power.
How to use
- Add the KinematicGripper component from the simulation component library.
- Define the gripping tool by selecting a 3D object either in the 3D View window or via the Assembly Structure window using the picker button in the
Object3Dproperty. - Configure the parameters to define the
DetectionModeand specify which part of the 3D object hierarchy should be gripped. - Activate the gripper via the
EnableGripperinput. Any valid dynamic or kinematic 3D object detected will instantly link to the gripper's motion.
Note
The RigidBodyBehavior of the 3D object acting as the gripper itself must be set to static, kinematic, or none.
Parameters
The behavior and detection settings of the KinematicGripper can be customized using the properties below. These settings define which 3D object types are targeted, how they are detected via physics or optics, and which node within a nested 3D object hierarchy is attached to the gripper.
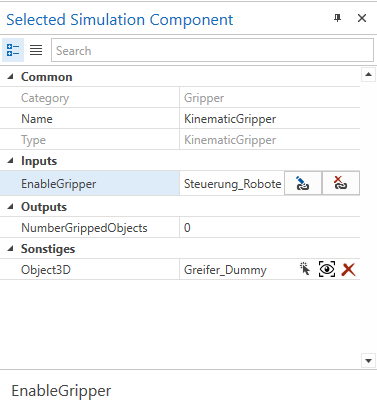
Object3D
The 3D object designated to act as the gripper. Its RigidBodyBehavior must be static, kinematic, or none.
Note
The none behavior is exclusively supported if the DetectionMode is set to Ray.
GripDynamicObjects
Enables the gripping of dynamic 3D objects. When disabled, 3D objects with a dynamic RigidBodyBehavior are ignored.
GripKinematicObjects
Enables the gripping of kinematic 3D objects. When disabled, 3D objects with a kinematic RigidBodyBehavior are ignored.
DetectionMode
Sets the 3D object detection method to either physical collision or ray cast.
Collisionmeans 3D objects are gripped instantly upon physical contact with the gripper's 3D geometry.Raymeans a directional laser or light ray is projected to identify and lock target 3D objects.
GrippingScope
Defines whether to grip the directly colliding 3D object or its designated parent 3D object.
HitObjectlocks the exact 3D sub-part or 3D object that physically triggers the contact or ray hit.HitParenttraverses up the 3D object hierarchy from the hit point to find and grip a parent 3D object matching theHitParentName.
HitParentName
Specifies the exact or partial name filter for the parent 3D object to be gripped. Upon a collision or ray hit, the system traverses up the object hierarchy to locate the first parent object that contains this name. The name comparison is case-sensitive.
Note
This property is only visible and evaluated when GrippingScope is configured as HitParent.
GlobalDirection
Indicates the direction of the light ray in the global coordinate system.
GlobalOrigin
Indicates the origin of the light ray in the global coordinate system.
Length
Indicates the length of the light ray in m.
Note
The ray configuration properties (GlobalDirection, GlobalOrigin, and Length) are only visible when DetectionMode is set to Ray.
Inputs
Inputs control the runtime behavior of the component, allowing external signals from a PLC or a script to dynamically activate or deactivate the gripping functionality.
EnableGripper
A boolean input that enables or disables the gripping mechanism. Disabling it during runtime instantly releases all currently held 3D objects.
Outputs
Outputs provide real-time status feedback from the gripper component during simulation, allowing connected PLCs, scripts, or monitoring tools to track the process state.
NumberGrippedObjects
An integer output indicating the total number of 3D objects currently locked and held by the gripper.
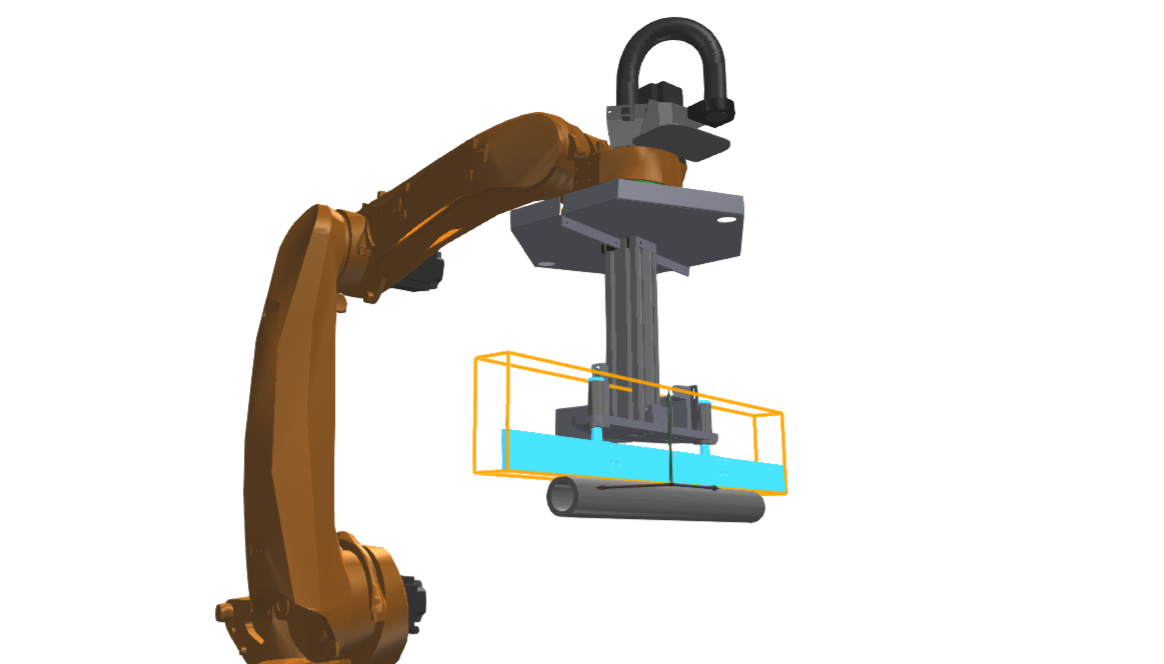
Example
In this layout, a robot is tasked with picking up and handling various types of tubes, which are configured as dynamic rigid bodies within the simulation environment.
The 3D object representing the robot's mechanical tool is selected as the gripper template. The RigidBodyBehavior of this gripper geometry is defined as kinematic.
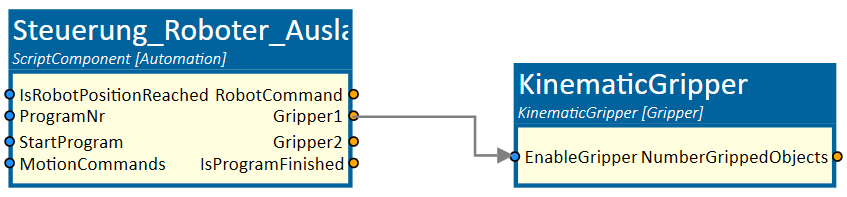
A ScriptComponent manages the operational logic by toggling the gripper input. To drive the physical joints and axes of the robot arm, a KinematicRotationMover component is utilized.
Further Information
For more details visit the Video Guides section, where you can find a video guide demonstrating this topic under Simulate high-performance kinematic grippers.