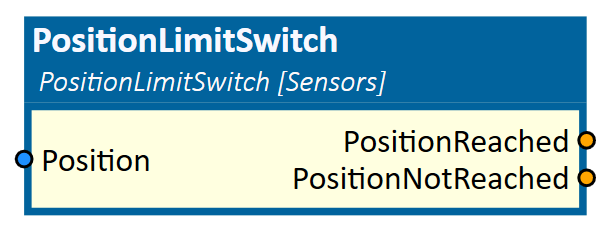
PositionLimitSwitch
This sensor outputs a boolean value indicating whether an input position is out of a configurable range or not.
When to use
Use this simulation component if you want to monitor, if an input position is within a configurable lower and upper limit. The component outputs a boolean value indicating whether an input position is out of the range or not.
How to use
Add this simulation component from the simulation component library. Define the parameters LowerSwitchPosition and UpperSwitchPosition and connect an output position to the input Position of the simulation component.
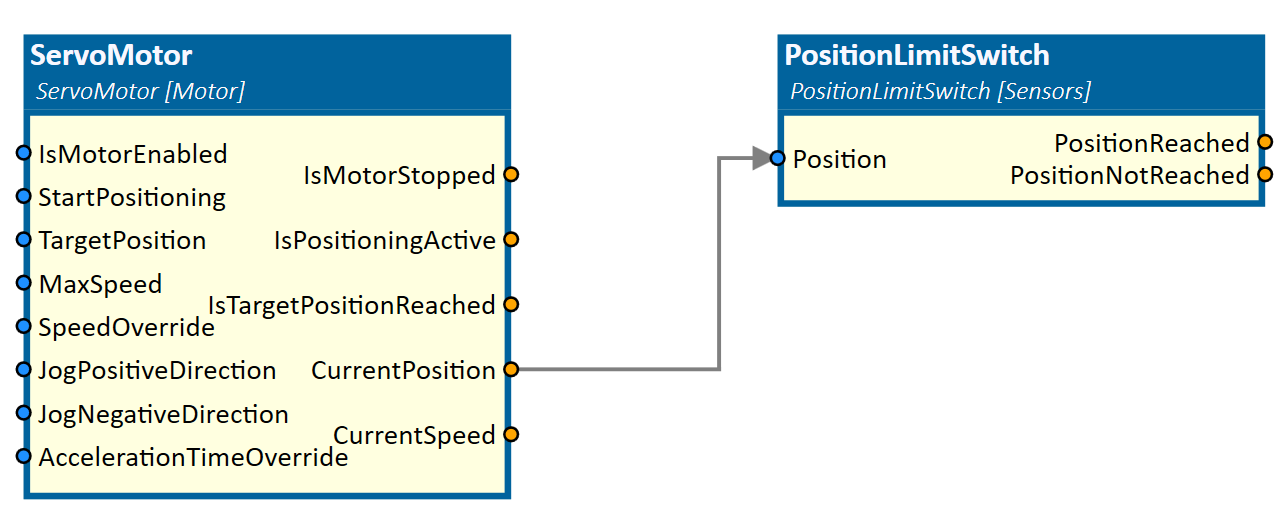
In this example, the position output of a ServoMotor simulation component is monitored with the PositionLimitSwitch sensor.
Parameters
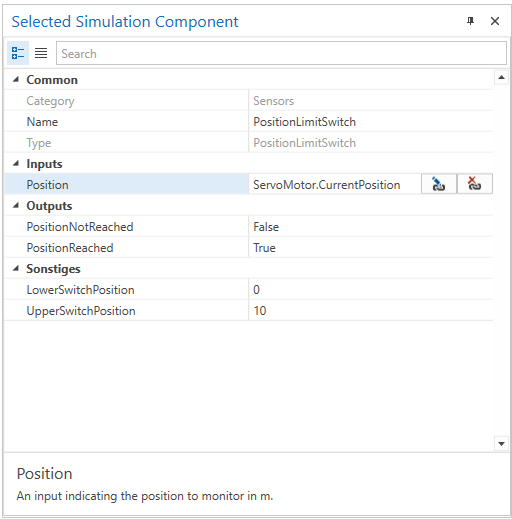
LowerSwitchPosition
A value in m which indicates the lower bound of the switch interval.
UpperSwitchPosition
A value in m which indicates the upper bound of the switch interval.
Inputs
Position
An input indicating the position to monitor in m.
Outputs
PositionReached
An output indicating whether the input Position is inside the interval given by the parameters LowerSwitchPosition and UpperSwitchPosition or not.
PositionReachedReached
An output indicating whether the input Position is outside the interval given by the parameters LowerSwitchPosition and UpperSwitchPosition or not.
Example
In this example, the output CurrentPosition of the simulation component ServoMotor is monitored as shown in the picture before. The bounds are defined with [0 m, 10 m].