TON
This simulation component turns an output on after a delay.
When to use
Use this simulation component if you want to delay a boolean signal on a rising edge.
How to use
Add this simulation component from the simulation component library. Define the Delay value that delays the input signal on the rising edge.
After the input is set from false to true, the output is set to true after the delay timer has elapsed. If the input signal is reset to false, also the output signal is reset.
Note
The delay function works only if the simulation is running.
Parameters
DelayInS
Indicates the duration of the delay in seconds at which the rising edge of the input signal is delayed.
Inputs
In
An input which rising edge starts the delay timer.
Outputs
Out
The output is set to true after the delay timer has elapsed.
Example
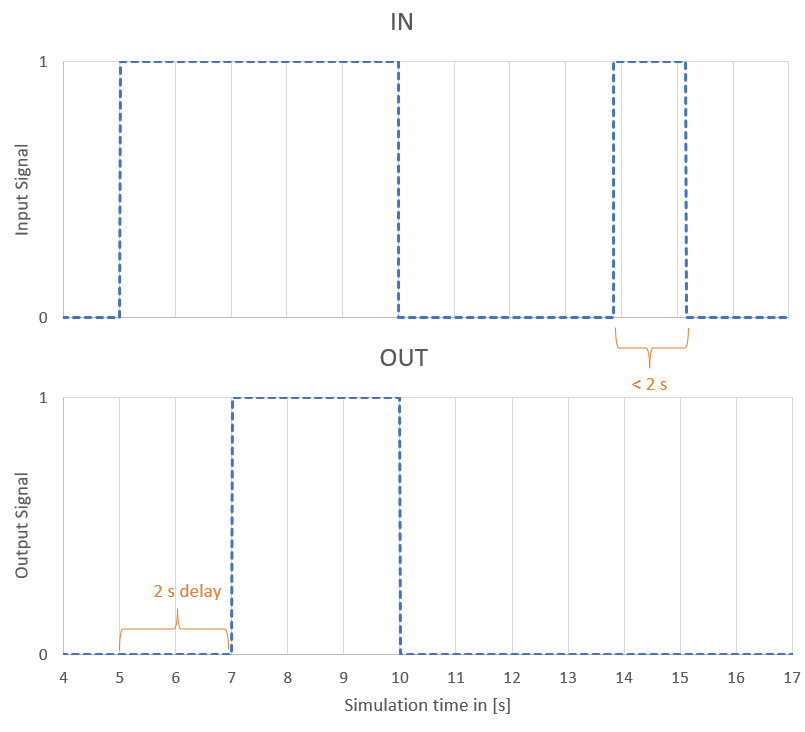
In the following diagram, you see the relationship of the TON inputs and outputs when the given Delay is set to 2 seconds. 2 seconds after the input signal is set from false to true, the output signal follows to true.
If the input signal is set from true to false, also the output is reset.
If the input signal is set from false to true for a time less than the configured delay, which is shown after 13 seconds, the output does not follow the input signal.