EndiannessChanger
This simulation component changes the byte order of an input value.
When to use
Use this simulation component if you need to change the byte-order when exchanging data between systems with different endianness.
How to use
Add this simulation component from the simulation component library. Define the DataType of the Input signal whose byte order should be changed.
Parameters
DataType
The data-type of the input signal.
Inputs
Input
An input indicating a value whose byte order will be changed. The data-type can be specified by the DataType property.
Outputs
Output
An output indicating the input value with changed byte order.
Example
In this example, data is exchanged between Kuka.OfficeLite, the virtual robot controller from KUKA, and a Siemens PLC. Since these two systems are using different endianness, an EndiannessChanger is needed to exchange non-boolean values.
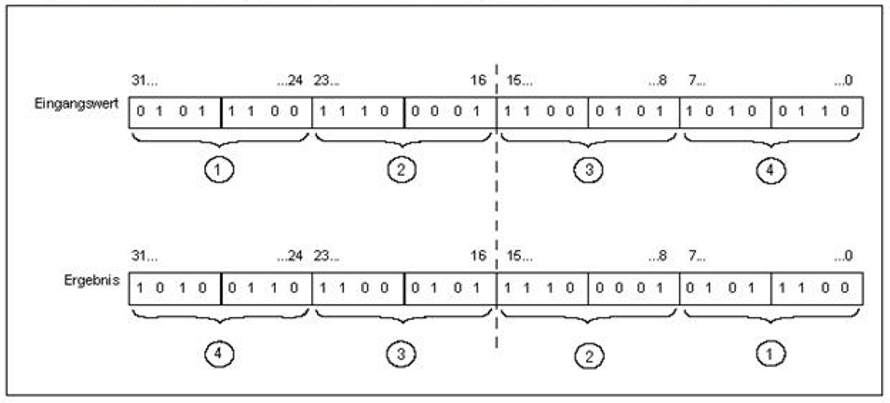
The following figure illustrates, how the byte-order is changed:
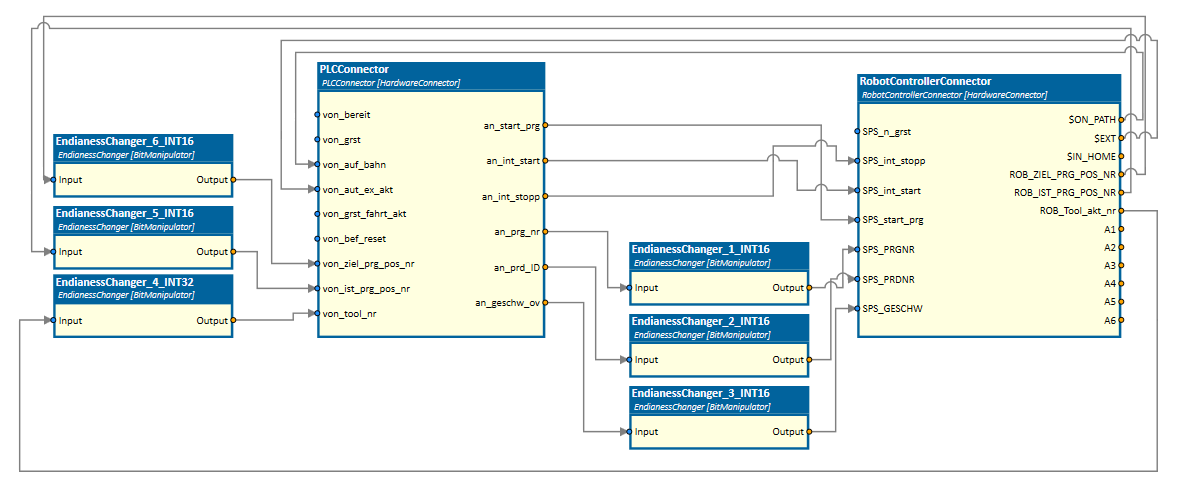
A RobotControllerConnector is used to connect to Kuka.OfficeLite and a PLCConnector is used to connect to the Siemens PLC. To change the byte-order of all non-boolean signals, an EndiannessChanger is used, as shown in the figure below.
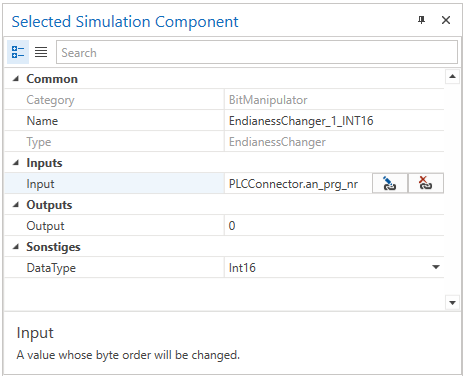
The properties of the EndiannessChanger are defined as follows: