Gain
This simulation component multiplies the input by a constant, configurable value (gain).
When to use
Use this simulation component if you want to multiply an input signal by a configurable value.
How to use
Add this simulation component from the simulation component library. Define the Gain value with which the Input is multiplied.
Connect an output to the Input of the Gain simulation component and start the simulation.
Parameters
Gain
Indicates a value with which the input Input is multiplied.
Inputs
Input
An input which will be multiplied by the parameter Gain.
Outputs
Output
Outputs a signal whose value is Input * Gain.
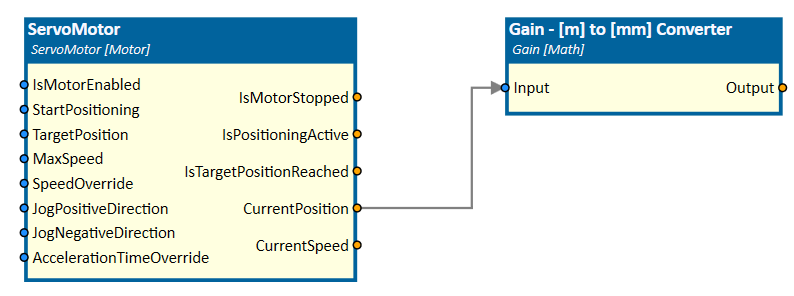
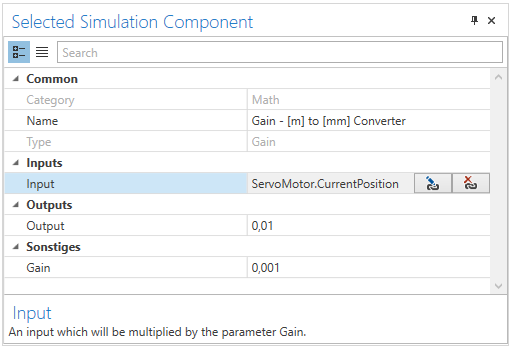
Example
In this example, the position output of the simulation component ServoMotor is converted from m to mm.
Further Information
For more details visit the Video Guides section, where you can find a video guide demonstrating this topic under Pivoting cylinder.