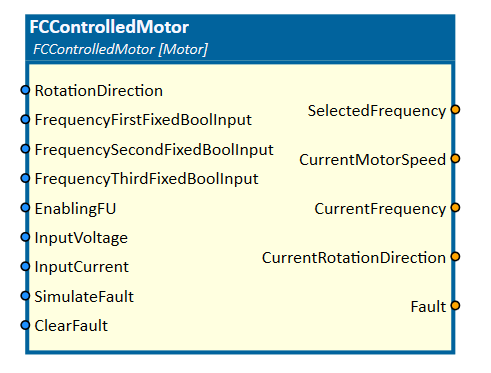
FCControlledMotor
This simulation component emulates the behavior of a frequency controlled motor.
When to use
Use this simulation component if you want to generate a motor speed output whose value is computed according to a ramp-up and ramp-down time.
For example, you can connect the CurrentMotorSpeed output to a Conveyor simulation component to generate speed on the conveyor.
How to use
Add this simulation component from the simulation component library.
Define your ControllingType property and set the corresponding parameters.
If Frequency is defined as ControllingType you can generate a CurrentMotorSpeed output by setting one of the FrequencyFixedBoolInputs as shown in the picture above.
Note
The CurrentMotorSpeed output will only be generated if the simulation is running and the SelectedFrequency output is set.
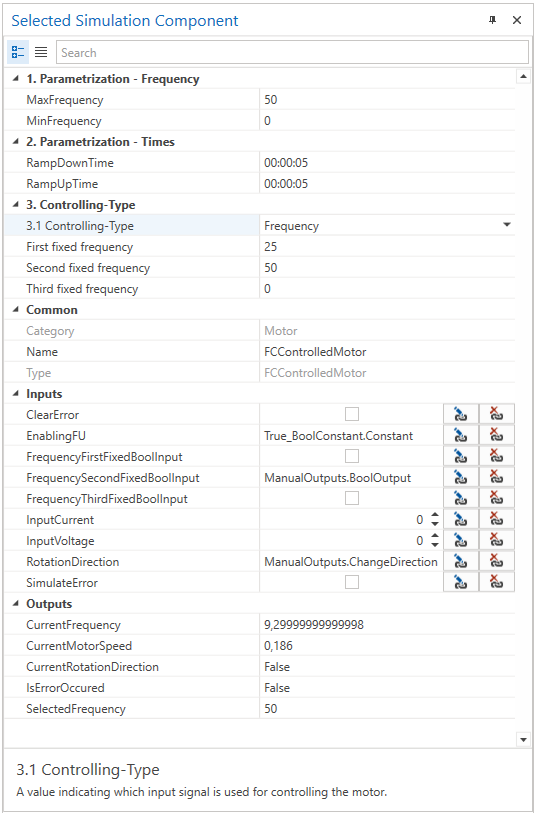
Parameters
MaxFrequency
A value indicating the maximum frequency of the motor in Hz.
MinFrequency
A value indicating the minimal frequency of the motor in Hz.
RampDownTime
A value indicating the ramp-down time of the motor speed in s.
RampUpTime
A value indicating the ramp-up time of the motor speed in s.
ControllingType
A value indicating which input signal is used for controlling the motor. You can find an explanation of the different controlling types in the tables below.
Frequency
| Name | Description |
|---|---|
| First fixed frequency | Indicates the value of the TargetFrequency which will be set on the positive edge of FrequencyFirstFixedBoolInput. |
| Second fixed frequency | Indicates the value of the TargetFrequency which will be set on the positive edge of FrequencySecondFixedBoolInput. |
| Third fixed frequency | Indicates the value of the TargetFrequency which will be set on the positive edge of FrequencyThirdFixedBoolInput. |
Voltage
| Name | Description |
|---|---|
| Max current parameter | Indicates the upper voltage limit which is used to calculate the TargetFrequency output if the InputCurrent input is set. |
| Min current parameter | Indicates the lower voltage limit which is used to calculate the TargetFrequency output if the InputCurrent input is set. |
An InputCurrent value of 5 V within the limits of 0 and 10 V sets a target frequency of 50 percent of the defined max frequency.
Current
| Name | Description |
|---|---|
| Max current parameter | Indicates the upper current limit which is used to calculate the TargetFrequency output if the InputVoltage input is set. |
| Min current parameter | Indicates the lower current limit which is used to calculate the TargetFrequency output if the InputVoltage input is set. |
An InputVoltage value of 10 mA within the limits of 0 and 10 mA sets a target frequency of 100 percent of the defined max frequency.
Inputs
SimulateError
An input which simulates an error if set.
ClearError
An input which resets an error if set.
EnablingFU
An input indicating whether the motor is allowed to move or not.
If this input changes to False the motor stops until the input is reactivated again.
FrequencyFirstFixedBoolInput
An input which sets the target frequency which is defined by the first fixed frequency parameter property.
FrequencySecondFixedBoolInput
An input which sets the target frequency which is defined in the second fixed frequency parameter property.
FrequencyThirdFixedBoolInput
An input which sets the target frequency which is defined in the third fixed frequency parameter property.
InputCurrent
An input which sets the target frequency depending on the min/max current parameter defined in the properties. An input value of 5 mA within the limits of 0 and 10 mA sets a target frequency of 50 percent of the defined max frequency.
InputVoltage
An input which sets the target frequency depending on the min/max voltage parameter defined in the properties. An input value of 5 V within the limits of 0 and 10 V sets a target frequency of 50 percent of the defined max frequency.
RotationDirection
An input indicating the rotation direction of the motor. If input is set to true, the rotation direction changes.
Outputs
CurrentFrequency
An output indicating the current frequency.
CurrentMotorSpeed
An output indicating the current motor speed in percent. The output speed is the percentage relationship between the target and current frequency.
CurrentRotationDirection
An output indicating the current rotation direction. If output is false, the motor rotates in positive direction.
IsErrorOccured
An output indicating if an error is simulated or not.
SelectedFrequency
An output indicating the target selected frequency.
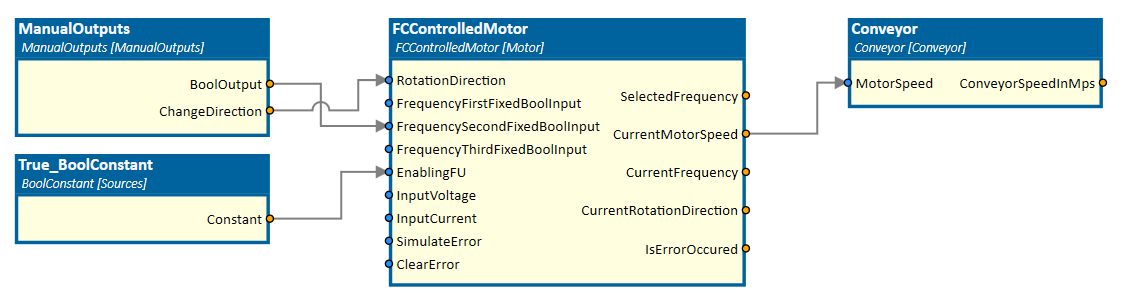
Example
In this example, the ControlPanel, the Conveyor and the FCControlledMotor simulation component are working together to control a conveyor manually by the user as shown in the picture above.
The FCControlledMotor is enabled by a BoolConstant value. If the BoolOutput of the ControlPanel simulation component is set manually, the SelectedFrequency output is set to 50 Hz.
If the simulation is running, the motor ramps up within 5s to the SelectedFrequency value and generates the CurrentMotorSpeed output value.
Further Information
For more details visit the Video Guides section, where you can find a video guide demonstrating this topic under How to control conveyor belts.