RaySink
This simulation component removes any rigid body object (e.g. dynamic, kinematic) which are in contact with the ray during simulation.
When to use
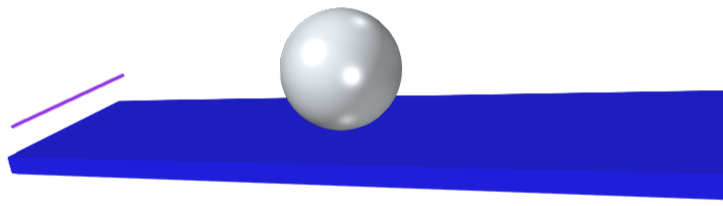
Use this simulation component if you want to remove any rigid body object which ray of the RaySink while the simulation is running. For example, the sphere in the figure below is rolling down a slope and should be removed when it touches the ray.
How to use
Add this simulation component from the simulation component library. Select a SinkObject, if desired, and define if dynamic or/and kinematic objects should be removed when they touch the LightBarrier. Set the EnableSink input to True and start the simulation.
Note
The objects which are removed can't get restored with the reset!
Parameters
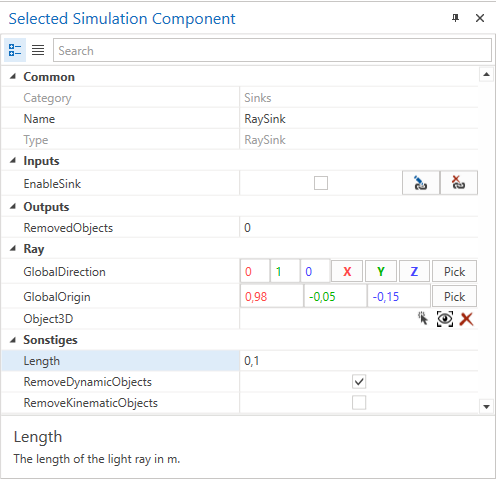
RemoveDynamicObjects
Indicates whether dynamic 3D objects will be removed when they touch the sink object or not.
RemoveKinematicObjects
Indicates whether kinematic 3D objects will be removed when they touch the sink object or not.
GlobalDirection
Indicates the direction of the light ray in the global coordinate system.
GlobalOrigin
Indicates the origin of the light ray in the global coordinate system.
Length
Indicates the length of the light ray in m.
Object3D
Indicates the 3D object the light ray is attached to. If not set, the reference of the light ray is the world origin.
Inputs
EnableSink
An input indicating whether the sink removes touching objects or not.
Outputs
RemovedObjects
An output indicating how many 3D objects have been removed by this sink since the last simulation reset.
Example
In this example, Sphere rolling down a slope into RaySink, should be deleted.
The EnableSink is connected to a BoolConstant simulation component which outputs a constant True value.

Further Information
For more details visit the Video Guides section, where you can find a video guide demonstrating this topic under Remove 3D-Objects with sinks.