NumberComparer
Compares two double values with the selected comparison operator and a tolerance.
When to use
Use this simulation component if you want to compare the values of inputs and outputs the result.
How to use
Add this simulation component from the simulation component library. Select an comparison operator. Connect output signals with the inputs of the NumberComparer simulation component and start the simulation.
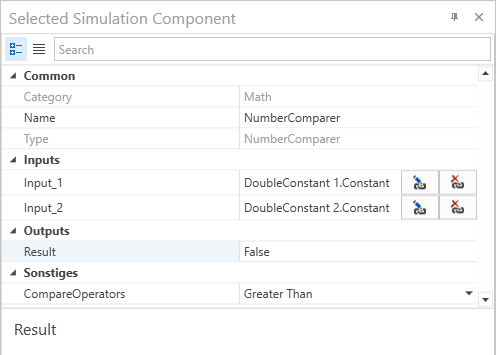
Parameters
CompareOperators
A selection of comparison operators.
Tolerance
A value that defines a tolerance range of the comparative operation.
Inputs
A value wich is compared with another value
Outputs
Result
Indicates the result of compared inputs.
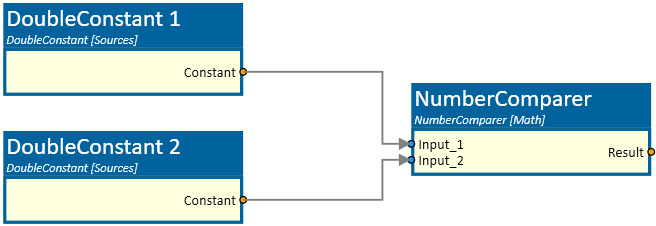
Example
In this example, a the value of a DoubleConstant is compared with an other DoubleConstant.