Install and uninstall a license
In order to use twin with the full range of functions, you need a valid license. Without a valid license, the software will terminate automatically after one hour. During this time you can use a limited functionality of twin.
Note
If you want to try twin in form of a temporal limited demo version, you must request a demo license. Please follow the steps below to generate a license request. When sending the request please ask for a demo license.
twin automatically checks on startup whether a valid license is available in the digifai online portal. If no valid license is available, a license must be requested.
Request a license
If twin is started without a valid license, the following window appears with which a license can be requested:
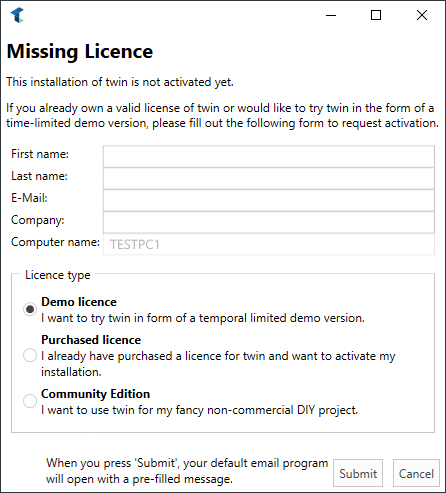
After the request has been sent, a responsible person will activate the license and inform you. The next time you start twin you can use the acquired functionality.