Sum
This simulation component computes the sum of the values of an arbitrary number of inputs.
When to use
Use this simulation component if you want to sum the values of inputs and output the result.
![]()
How to use
Add this simulation component from the simulation component library. Define an arbitrary number of inputs you want to sum with each other. Connect output signals with the inputs of the Sum simulation component and start the simulation.
Parameters
NumberInputs
Indicates the number of inputs you want to sum with each other.
Inputs
After the user defined the number of inputs, all inputs are listed here.
Outputs
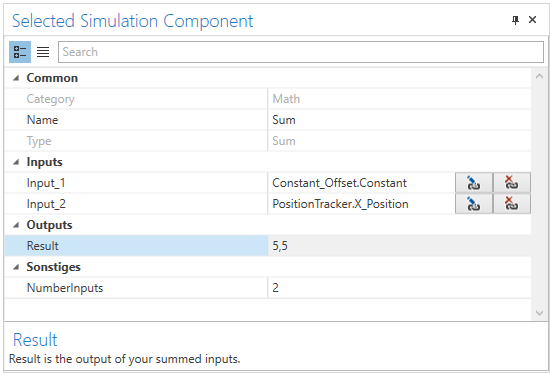
Result
Indicates the result of your summed inputs.
Example
In this example, a the value of a DoubleConstant is added to the output of a PositionTracker simulation component.