Object3DCutter
This simulation component enables cutting a dynamic 3D object by a defined plane.
When to use
Use this simulation component if you want to cut a dynamic 3D object. This feature enables to simulate saw blades to cut any dynamic 3D objects.
How to use
Add this simulation component from the simulation component library.
Define the 3D object, which acts as the saw blade by selecting a 3D object either in the 3D View window or in the Assembly Structure window using the select button in the Object3D property.
Pick three points to create a cutting plane on the saw blade by selecting the buttons GlobalP1, GlobalP2 and GlobalP3. If the input 'EnableCutting' is set to 'True', all dynamic 3D objects cut by the cutting plane will be split into two objects.
Note
The property RigidBodyBehavior of the 3D object, which acts as the saw blade, must be None.
Parameters
GlobalP1/GlobalP2/GlobalP3
Indicating the points of the cutting plane in global coordinates.
SeperationAfterSlice
Indicates the separation in m of the new 3D objects after they are sliced. The separation is normal to the plane.
Object3D
The 3D object which acts as a saw. The pose of the plane is linked to this object. The property RigidBodyBehavior of the 3D object, which acts as the saw blade, must be None.
Inputs
EnableCutting
Enables the cutting process. If a dynamic 3D object can be detected within the plane, the object will be cut at this position. A cut is made on each positive flange on that input.
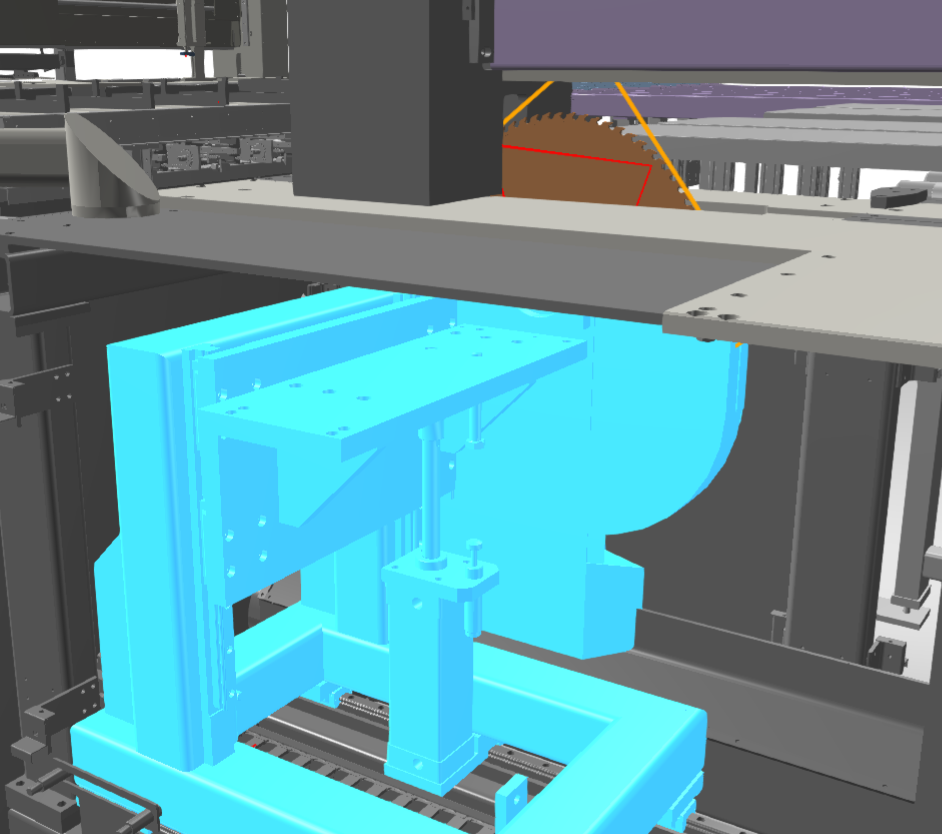
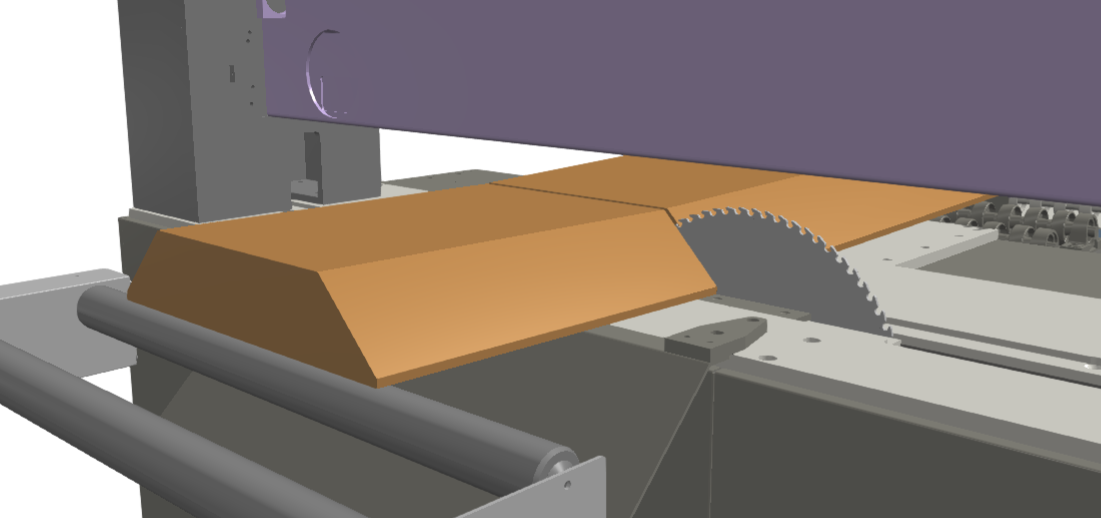
Example
In this example, the saw is moved with a guide carriage along the cutting axis and in z-direction with a lifting cylinder. The plane on the blade is visible when the Object3DCutter simulation component is selected. This can be seen in the following picture. The saw blade is the unselected, orange 3D object.